建图
启动 SLAM¶
安装turtlebot4_navigation¶
运行以下指令:
sudo apt install ros-humble-turtlebot4-navigation
运行SLAM¶
建议在远程PC上运行同步SLAM以获得更高分辨率的地图,运行以下指令:
ros2 launch turtlebot4_navigation slam.launch.py
也可以使用异步 SLAM,运行以下指令:
ros2 launch turtlebot4_navigation slam.launch.py sync:=false
要更改地图分辨率或其他 SLAM 参数,请复制默认配置并进行修改,然后将参数作为启动参数传入。例如运行以下指令:
ros2 launch turtlebot4_navigation slam.launch.py params:=/full/path/to/slam.yaml
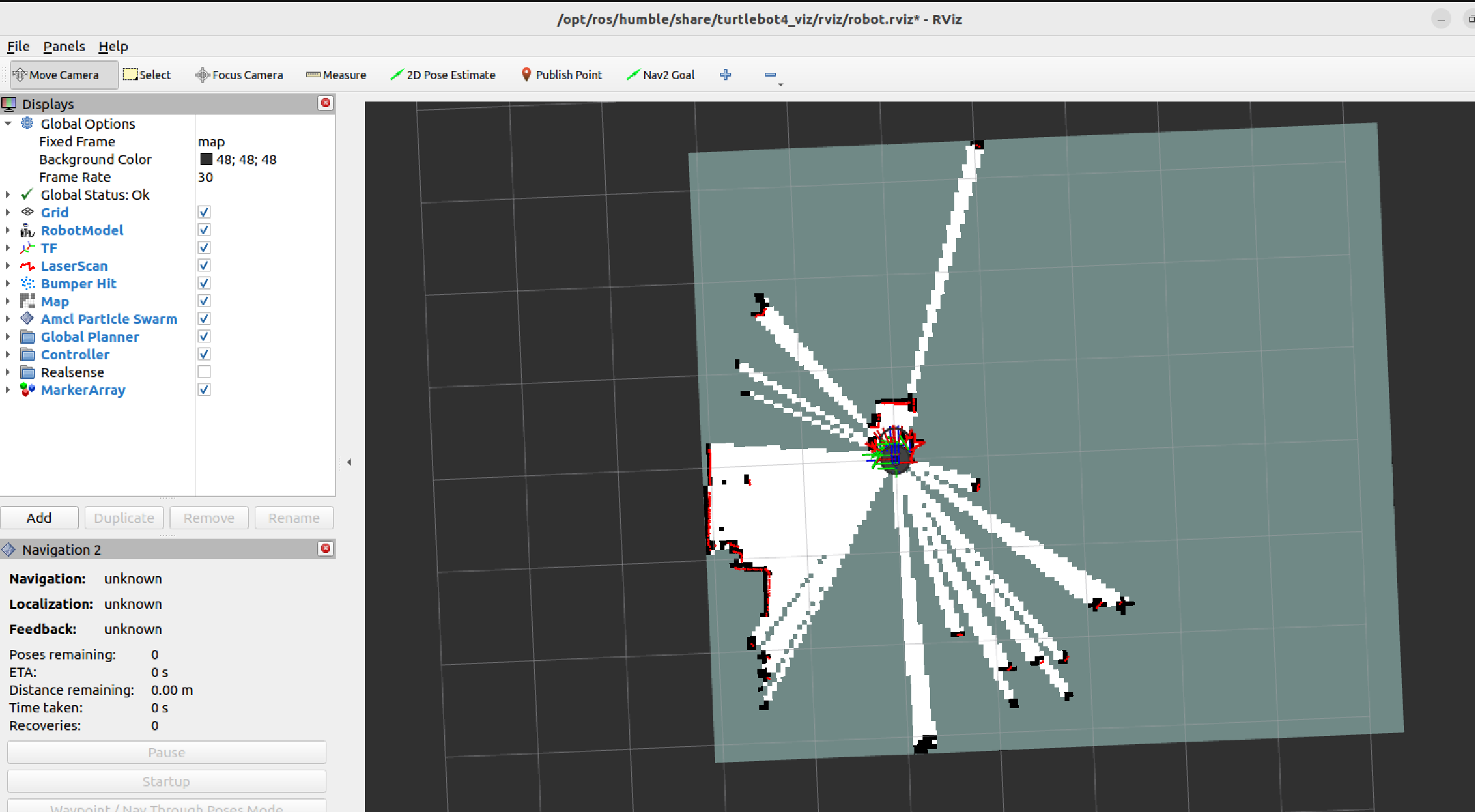
启动RVIZ2¶
新建命令行,输入以下指令:
ros2 launch turtlebot4_viz view_robot.launch.py
即可实现地图的可视化。
控制TurtleBot4¶
控制turtlebot4进行运动,逐步完成建图,推荐使用控制器进行控制。
保存地图¶
对地图满意后,可保存所创建的地图。新建命令行,输入以下指令:
ros2 run nav2_map_server map_saver_cli -f map
其中可将"map"替换为您自己的地图名称。
执行该命令后,系统会生成一个"map_name.pgm"文件与一个"map_name.yaml"文件。