RVIZ2
Rviz2 是 Rviz 到 ROS 2 的端口。它为用户提供了一个图形界面,用于查看他们的机器人、传感器数据、地图等。默认情况下,它与 ROS2 一起安装,需要使用桌面版本的 Ubuntu。Turtlebot4 Desktop 软件包提供了用于在 Rviz2 中查看 TurtleBot4 的启动文件和配置。
View Model¶
为了检查turtlebot4的模型和传感器数据,请在PC终端中运行下列命令:
ros2 launch turtlebot4_viz view_model.launch.py
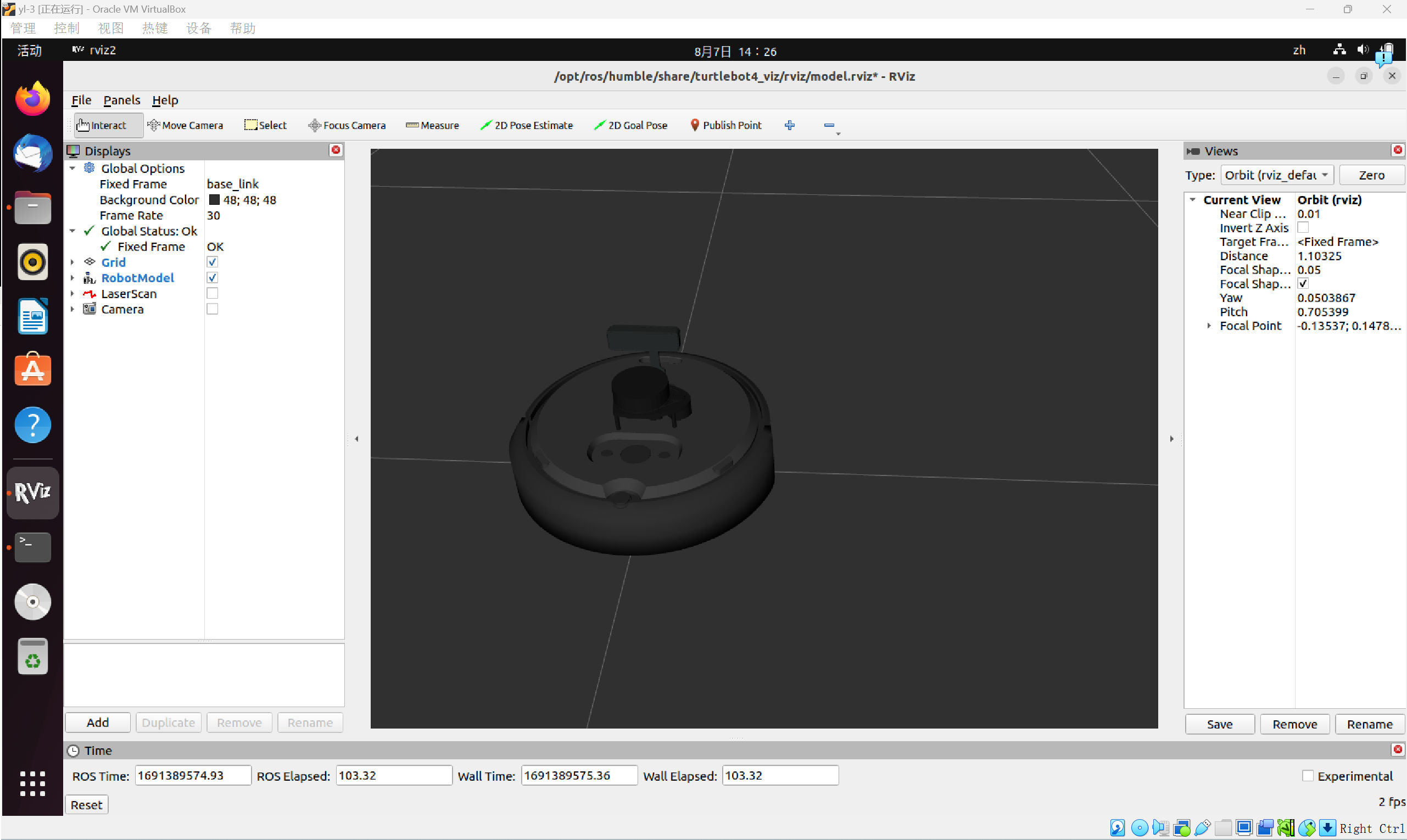
为了检查雷达和传感器数据,在左侧框中订阅"LaserScan"和"Camera"相关话题
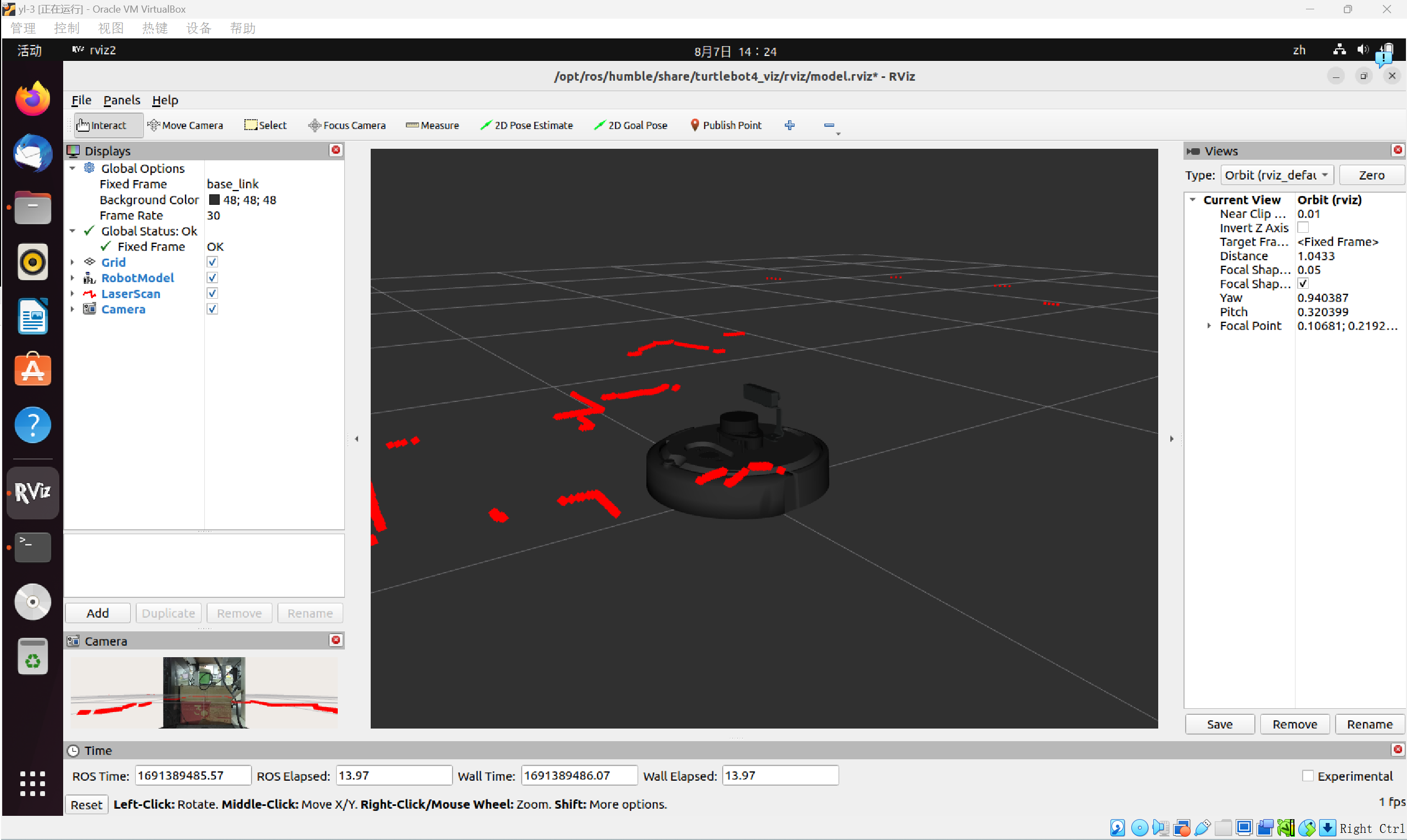
也可以通过点击左侧框中的"Add"键来获取并显示其它topic。
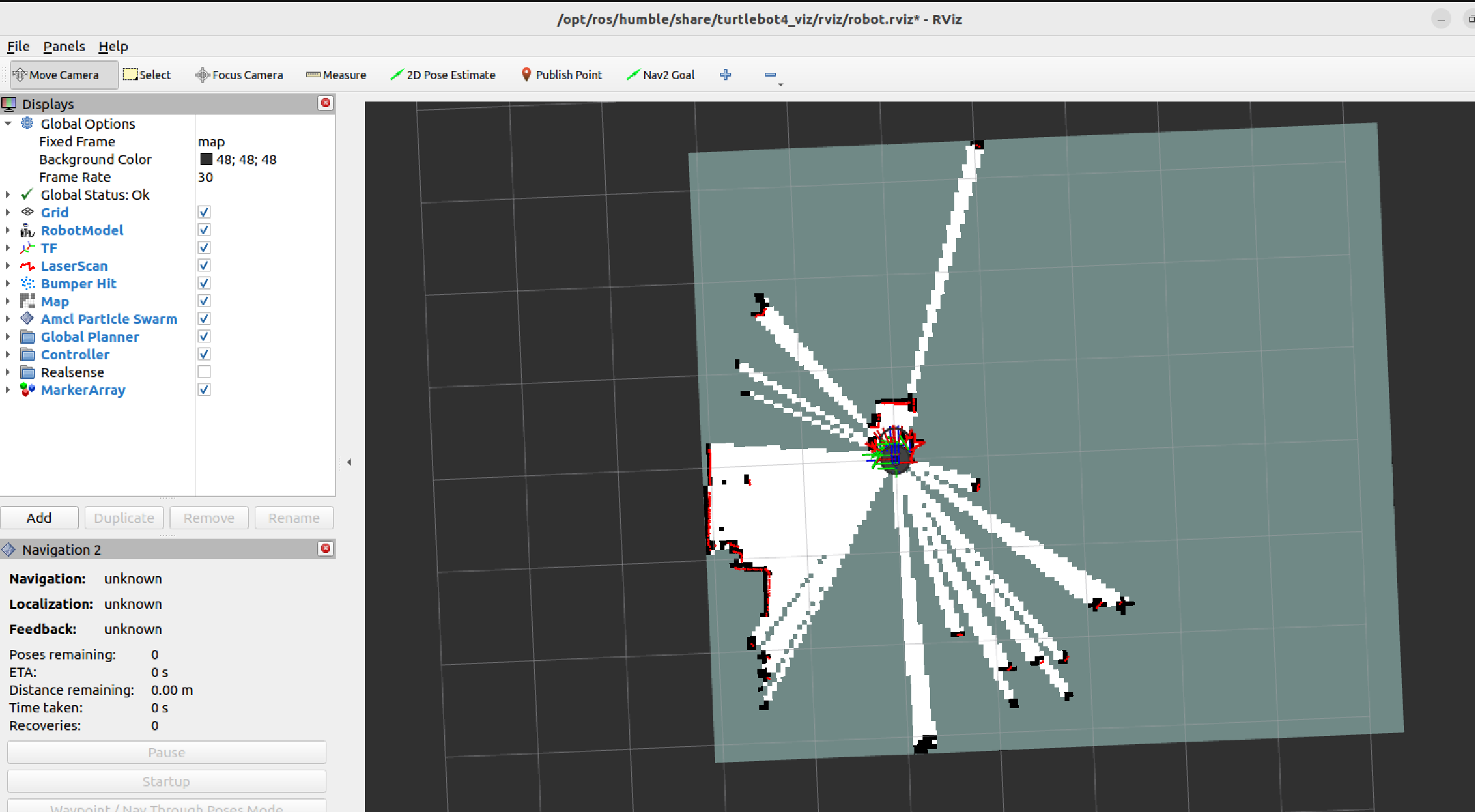
View Robot¶
要获得机器人在其环境中的俯视图,请运行:
ros2 launch turtlebot4_viz view_robot.launch.py
这在使用机器人进行建图或导航时很有用。