导航功能¶
启动导航¶
1.关闭其他相关程序,启动bringup程序(不打开RVIZ),打开终端运行以下指令:
ros2 launch iqr_turtlebot_bringup bringup.launch.xml use_rviz:=false
2.使用导航配置启动RVIZ,打开一个新的终端运行以下指令:
ros2 launch iqr_turtlebot_navigation display.launch.xml viz_config:=nav
3.开始导航,打开一个新的终端运行以下指令:
# 使用您的地图文件替换 test.yaml
ros2 launch iqr_turtlebot_navigation nav2.launch.xml map:=map.yaml
4.对TurtleBot 4进行地图定位:

注意到界面上方有如上图所示三个可操作按钮,执行以下操作:
- 点击"2D Pose Estimate"按钮在地图中设置turtlebot4的初始位置,等待地图变为类似如下样式:
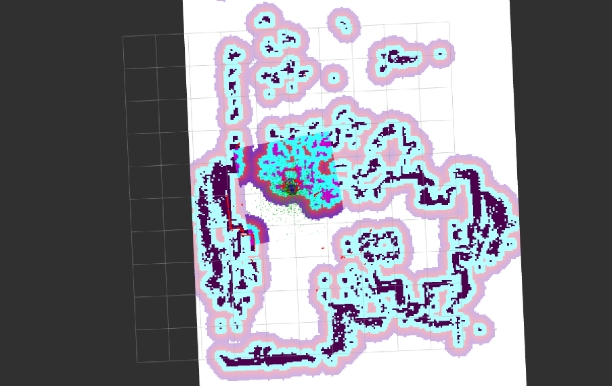
-
调整turtlebot4位置,以使其位置与在地图中发表的初始位置相同(即雷达轮廓与地图轮廓重合);
-
点击"Nav2 Goal"按钮在地图中设置turtlebot4的目标位置,系统便会自动规划前往该目标的路径,TurtleBot 4会沿着该路径进行移动。