快速启动
前期准备¶
参考硬件描述,找到电源按钮,开启模块。
注意
如果电池电量过低,请先充电,避免电池过放无法开机
接入HDMI和鼠标,等待系统启动。
启动后,使用CTRL+T开启一个新的终端,然后键入以下指令启动
1 | |
1 | |
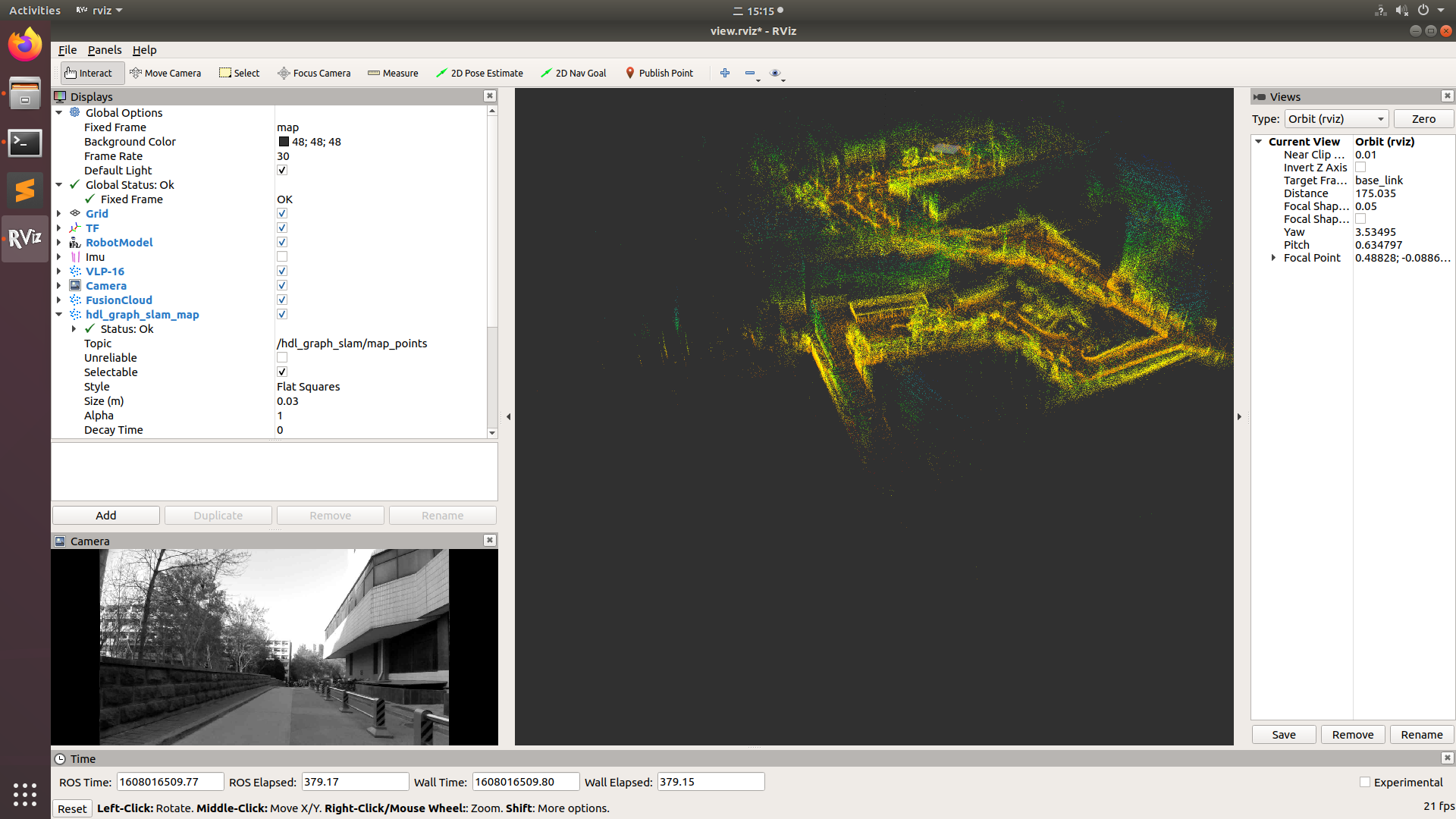
启动后即可看到如下图的画面,即表明建图程序已经开启
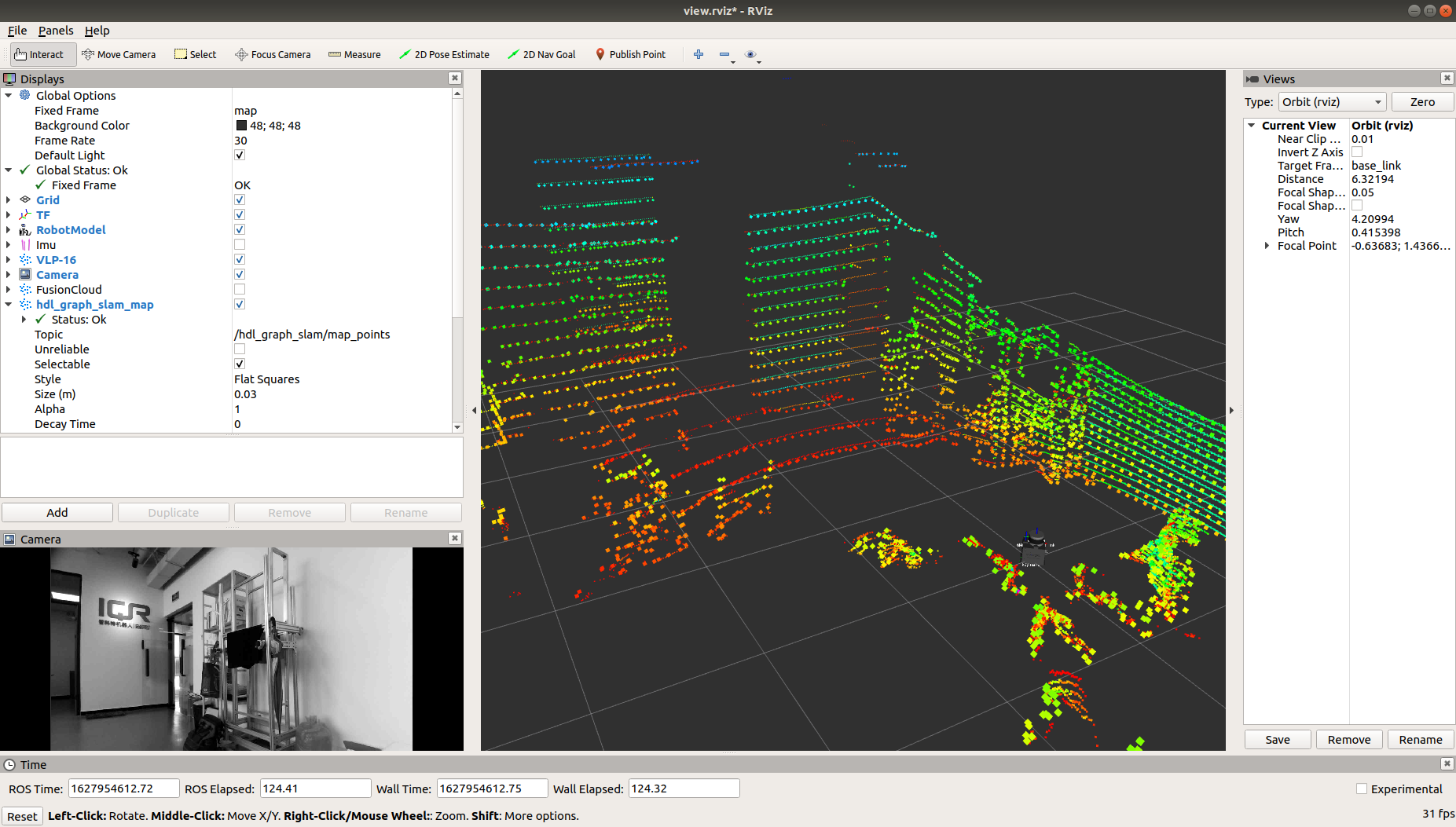
可以手持,或者将模块放在机器人上,在环境中建图,画面中左下角为摄像机看到的画面,中间的部分为激光点云和建好的点云图
当建图完成后,将模块放置平稳,重新连接HDMI和鼠标
新开启一个终端,并在终端中输入如下指令,将建图结果保存到制定文件夹中
1 2 | |
地图存放完成后,关闭上述终端,然后启动一个新的终端,键入以下指令,开启后期处理软件
1 | |
后期处理软启动后,可以看到如下界面
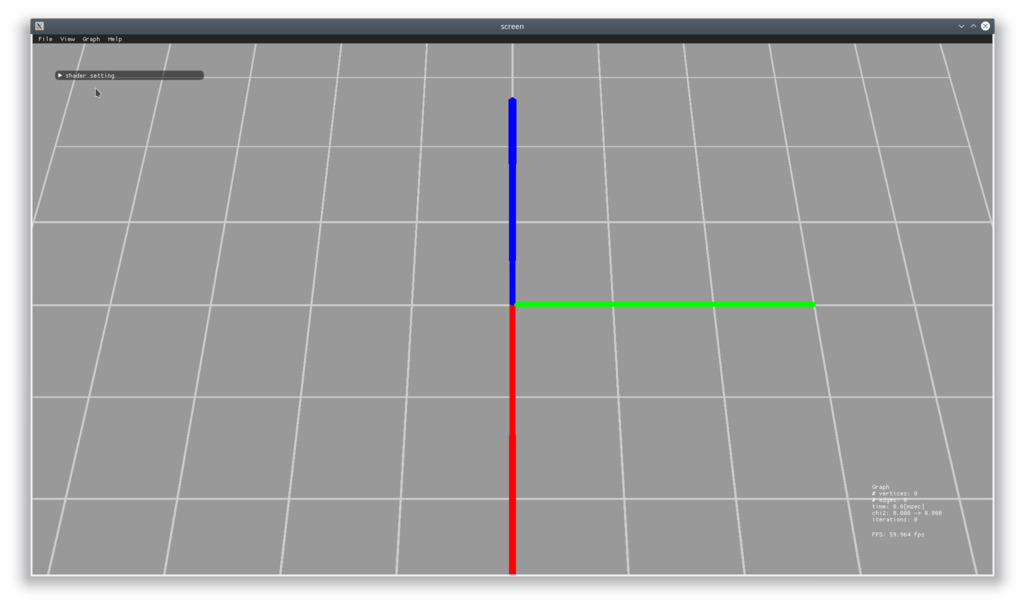
参考Interactive SLAM wiki,学习如何使用后期处理软件进行地图的二次处理
注意
室内和室外使用的建图参数不同,后期处理的侧重点也不一样,请将原始数据备份好,以免在后期处理时发生错误,导致数据丢失